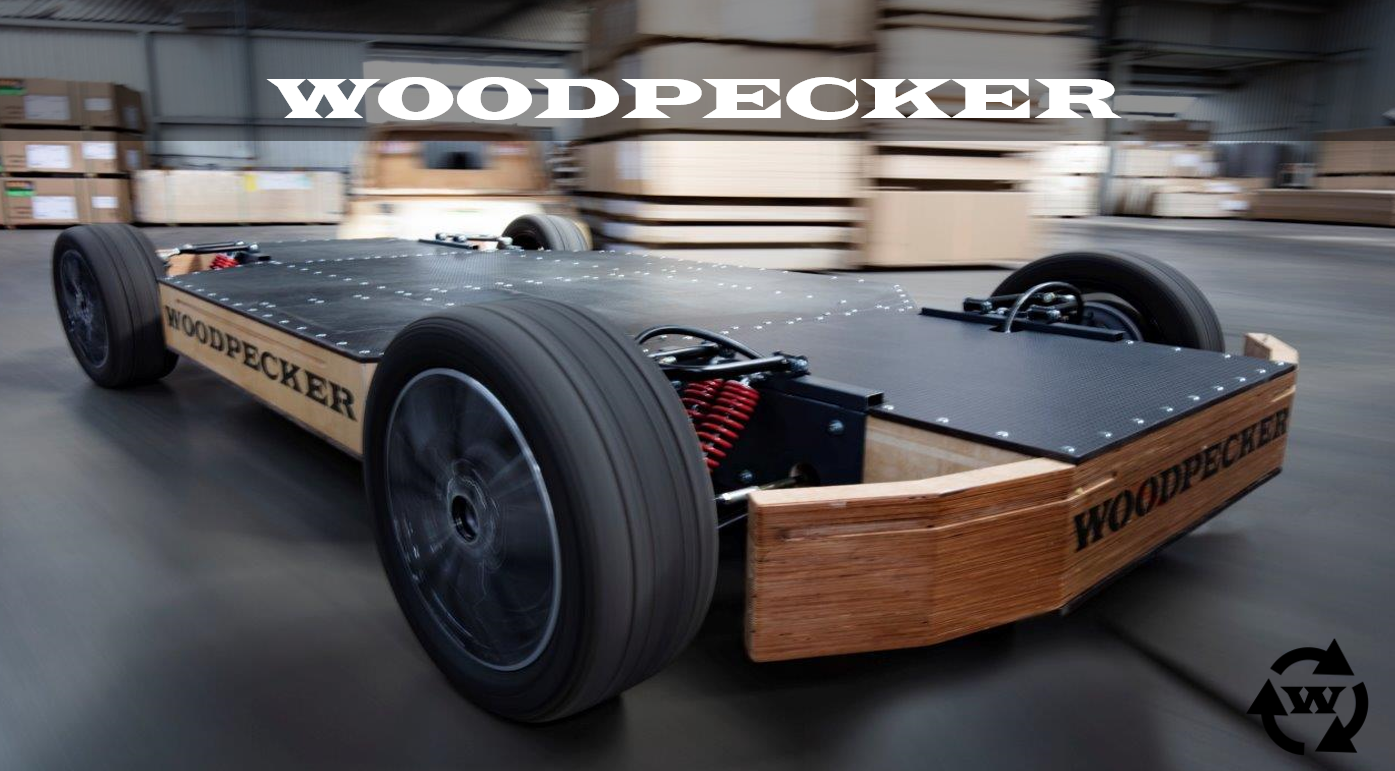

Final project outcome
The team completed a functional and reliable RC-controlled platform with integrated steering, acceleration, braking, electrical, and control systems. The final vehicle was demonstrated as an RC-controlled system rather than a fully autonomous vehicle.
